
1 引言
在現代機械制造業中,被稱為“工作母機”的數控機床在制造業發展中占據無可取代的地位,其研制水平在一定程度上象征著制造業的綜合實力。隨著制造業的高速發展,對機床生產的零件精度要求日益提高,機床精度的研究得到廣泛重視。
加工誤差是機床加工精度在工件上最直接的體現。加工誤差是指刀具實際加工軌跡與工件理論輪廓之間的偏差,幾何誤差是機床加工精度最直接、最關鍵的影響因素。如圖1所示,數控機床主要由平動軸和回轉軸構成,以數控外圓磨床為例,各軸運動誤差相互作用,共同影響數控機床的加工精度。
數控機床精度研究主要包括精度設計和誤差補償兩方面。精度設計是指在機床設計初期根據關鍵零部件誤差靈敏度分析結果,找到影響機床精度的關鍵誤差源,通過提高關鍵零部件的制造精度以及合理的公差分配方法來提升機床原始精度。誤差補償是通過硬件或軟件來調整刀具位姿、修改機床控制參數、調整G代碼來補償機床運動過程中產生的誤差。本文通過誤差建模、關鍵零部件靈敏度分析、精度優化分配以及誤差補償四個方面,探討數控機床精度優化設計的研究現狀和亟待解決的難題。
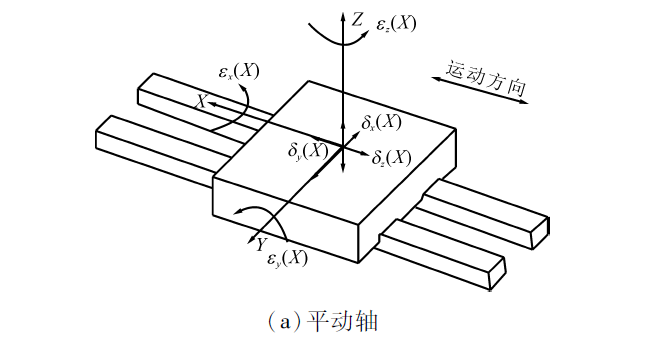
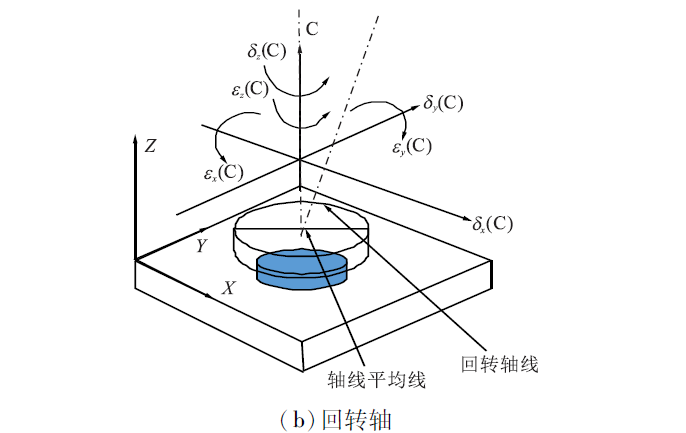
圖1 數控外圓磨床誤差因素
2 數控機床誤差建模方法
數控機床的主要誤差源包括零部件的制造誤差、關鍵零部件的裝配誤差、切削力產生的變形、主軸持續轉動引起的熱誤差以及控制誤差等。根據誤差的力學特性與動態特性,機床誤差通常分為靜態誤差與動態誤差。靜態誤差包含關鍵部件尺寸誤差和裝配體間的位姿誤差等。動態誤差主要包含各軸在運動過程中產生的變形振動及熱誤差等。為反映機床誤差源與刀具位姿誤差的映射關系,通過誤差建模表達機床各運動軸的空間位姿誤差。常用數學工具主要有旋量理論、指數積公式和四元法等,其中齊次坐標變換法應用最廣泛,其清晰的數學表達形式被廣泛應用于機床的誤差建模。在誤差建模方面,已開展大量的研究工作,目前已研究出多種不同的運動誤差數學模型建模方法,如幾何建模法、誤差矩陣法、機構學建模法、剛體運動學法和多體系統理論法等。Fan J.W.等基于多體系統運動學,通過構造機床整機拓撲結構(其中相鄰體相對運動如圖2所示)提出了一種通用的機床幾何誤差模型。Ding G.等基于多體系統理論和齊次坐標變換建立了五軸外圓銑床的空間定位精度模型。Wu C.等基于多體系統理論和相對運動約束方程,建立了五軸非正交數控機床的刀具位姿預測模型。
圖2 相鄰體相對運動示意圖
目前,誤差建模研究已相對成熟,對于研究精密及超精密加工條件下機床動態因素對機床精度的影響尤為重要,其中針對運動過程中產生的變形研究較多,針對熱誤差的研究相對較少。
3 關鍵零部件靈敏度分析
機床誤差靈敏度分析是通過研究零部件幾何誤差的不確定性來源對機床加工精度的敏感程度,對各零部件按敏感程度排序,找出對機床精度影響較高項進行合理分配公差,以此來提高機床空間定位精度。靈敏度分析常常被認為是誤差建模及分析的先決條件,是機床精度設計的重要理論依據。
目前,靈敏度分析方法主要分為局部靈敏度分析法和全局靈敏度分析法。相對局部靈敏度分析,全局靈敏度分析法綜合考慮了各因素的概率密度函數的分布及形狀的影響,在分析過程中,各因素可不斷變化。Cheng Q.等基于全局靈敏度分析法,提出了多軸機床關鍵幾何誤差識別方法,通過識別關鍵誤差,提高機床加工精度。Li J.等以五軸機床為例,在傳統靈敏度指數定義基礎上提出了廣義局部靈敏度指數、廣義全局靈敏度指數和一般全局靈敏度波動指數,該方法不僅減少了機床的誤差分量,還提高了刀具的切削精度。Fang J.等提出了基于擬蒙特卡羅算法的五軸機床加工誤差全局靈敏度分析方法。利用機床空間運動誤差模型,對各誤差源參數進行一定的數學運算,將所得結果進行歸一化處理并從大到小排序,以此來判斷對機床空間運動誤差影響較大的零部件。
靈敏度研究大多是基于機床空間誤差模型,對誤差源參數求導時會導致誤差源參數被消掉,無法反應誤差源參數隨機床位置變換而變化的特性,不能反映機床實際加工誤差。
4 機床精度優化分配方法
精度優化分配是指在給定的輸出精度要求下,分配機床關鍵零部件的精度,其關鍵在于建立合理的數控機床整體的精度優化模型,并采取有效的方法進行精度優化分配。在精度優化分配方法研究中,構建合理的精度優化模型是研究的重點。徐徐基于區間層次分析的機床精度層級映射方法,通過建立的機床精度成本和可靠性模型,利用優化的NSGA-Ⅱ遺傳算法,得到Pareto最優解的機床精度分配。Cheng Q.等基于靈敏度分析和一次二階矩理論,構建基于多體理論的多軸數控機床空間誤差模型,實現了以加工總成本為最小的幾何精度優化分配。Zhang Z.等考慮五軸機床的幾何約束,提出了基于機床幾何誤差和成本的可靠性模型的精度優化分配方法。Nujoom R.等提出了基于制造系統優化設計的多目標數學模型,為公差優化分配奠定理論基礎。
在目前的優化設計方法中,綜合成本因素過程大多依賴設計人員的經驗判斷,在實際設計中存在不確定性。
5 數控機床誤差補償方法
5.1 幾何誤差補償
現有數控機床的幾何誤差補償方式主要有兩種:硬件補償和軟件補償。硬件補償是指針對機床特性,利用某些補償裝置或微動機構對機床的幾何誤差進行修正。張兆瑞設計了一種絲杠傳動螺距矯正裝置,用于補償車床在加工精密絲杠時產生的誤差(見圖3)。Gan S.W.等設計了一種微動補償結構,實現了高精鏡面加工誤差補償。硬件補償可調節性較差或調節范圍有限,適用范圍小,當機床的幾何誤差發生較大變化時,補償機構無法發揮作用,此外硬件補償機構具有針對性,制造成本和設計周期也成為限制其發展的因素。
圖3 基于壓電陶瓷的微動補償機構
軟件補償是基于機床誤差預測模型發展的,通常在幾何誤差檢測、辨識后建立機床的加工誤差預測模型后,根據誤差預測模型計算得到工件加工過程刀尖點的空間位置誤差,通過進行坐標系零點偏置、修改NC代碼或在控制系統中增加前反饋補償的操作方式刀具提高空間定位精度。Shen H.等基于五軸數控機床的誤差預測模型,提出了修改坐標偏置幾何誤差補償方法,有效地補償了機床幾何誤差及熱誤差。余文利等提出了基于粒子群優化算法的數控幾何誤差補償方法,通過NC代碼優化工件,有效地提高了數控機床精度,補償流程如圖4所示。
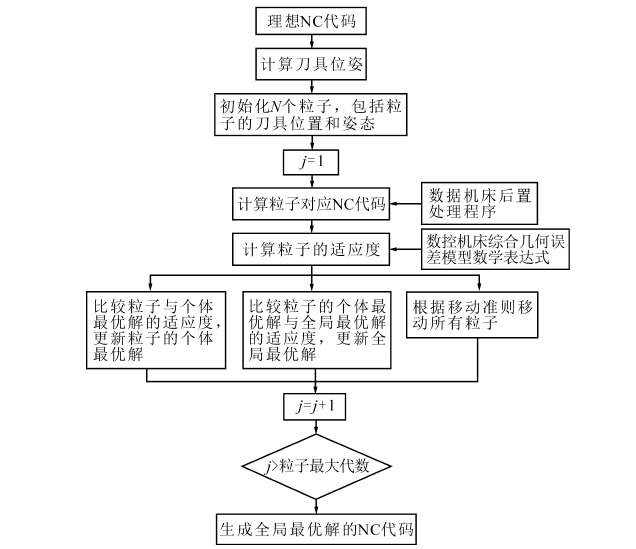
圖4 基于PSO算法的幾何誤差補償方法流程
5.2 動態誤差補償
動態誤差具有隨機、時變和動態特性,其補償方法與幾何誤差補償方法的差異較大。Chen C.Y.等提出了一種能夠自適應補償擾動的動態控制方法,通過控制自適應調節誤差補償器來實時跟蹤補償伺服系統的輸出。目前動態誤差的補償方法尚處于研究初期,機床動態精度的改善主要通過伺服增益的優化和調整控制算法來實現。
6 結語
本文從誤差建模、關鍵零部件靈敏度分析、精度優化分配及誤差補償四個方面對數控機床精度優化設計進行系統性地論述,雖然機床精度優化設計目前已經取得大量研究成果,但仍存在以下幾點亟待解決的問題:
(1)現有的數控機床誤差建模多以研究機床靜態性能為主。對于精密及超精密加工,影響機床加工精度的主要因素為機床動態誤差。因此,建立機床動態誤差源參數模型是當前的研究重點。
(2)靈敏度分析是近年來發展較迅速的新型分析方法,具有良好的診斷性和預測性。而此類研究方法得到的誤差源參數敏感度排序結果大多憑經驗得到,即距離加工點越遠的零部件對機床運行精度要求越大。實際并未考慮到誤差源參數隨機床運動而改變,如何真實反映機床實際加工誤差的產生規律是下一步研究重點。
(3)目前的精度優化分配主要分為公差優化分配和幾何精度優化分配。公差優化分配即零部件公差的研究,主要研究零部件的公差對該部件內部定位和幾何面之間關系產生的影響以及對該零部件精度尺寸鏈累計誤差影響。目前對于零部件與機床誤差源參數的關系研究仍缺少一套完整的理論方法。
(4)相比于硬件補償,軟件補償具有成本低、調節性好和補償方式多樣化等優點。軟件補償是目前的研究重點,如何提高誤差預測模型精度,提升軟件補償方法的補償效果以及動態誤差補償方法都是誤差補償研究的方向。
(來源:工具技術)


軸研所公眾號 軸承雜志社公眾號
Copyright © 2019 洛陽軸承研究所有限公司, All Rights Reserved 備案號:豫ICP备18028303号-3
豫公網安備 41030502000528號
營銷熱線
0379-64367521
0379-64880626
13693806700
0379-64880057
0379-64881181
 返回
返回